
Merge branch 'lab04_async' into 'main'
Lab04 async See merge request !70
No related branches found
No related tags found
Showing
- website/lab/04/images/board_buzzer.png 0 additions, 0 deletionswebsite/lab/04/images/board_buzzer.png
- website/lab/04/images/buzzer.png 0 additions, 0 deletionswebsite/lab/04/images/buzzer.png
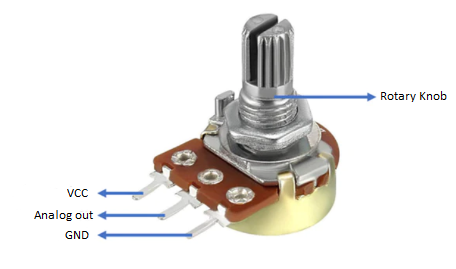
- website/lab/04/images/potentiometer_pins.png 0 additions, 0 deletionswebsite/lab/04/images/potentiometer_pins.png
- website/lab/04/index.md 188 additions, 89 deletionswebsite/lab/04/index.md
website/lab/04/images/board_buzzer.png
0 → 100644
{kind=link}

191 KiB
website/lab/04/images/buzzer.png
0 → 100644
{kind=link}

107 KiB
{kind=link}
62.3 KiB